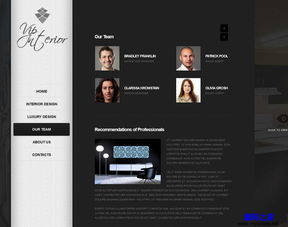
創意無限,個性定制 室內裝飾個性設計公司網頁模板演示
在數字化浪潮席卷的今天,一個公司的官方網站不僅是其線上名片,更是品牌理念與核心服務的直觀展現。對于室內裝飾個性設計公司而言,一個設計精良、功能完善的網頁模板,能夠有效吸引潛在客戶,展示設計實力,并最終促成業務轉化。以下將詳細展示一款專為室內裝飾個性設計公司打造的網頁模板演示圖及其核心設計理念。
一、視覺風格與第一印象
模板的整體視覺風格以現代、簡約、高質感為核心。首頁通常采用全屏輪播大圖或動態視頻背景,展示公司最具代表性的設計案例——可能是光線通透的極簡客廳、充滿藝術感的工業風loft,或是溫馨雅致的北歐風臥室。配色方案偏向中性色(如高級灰、米白、原木色)為主色調,輔以少量低飽和度的強調色(如深藍、墨綠、陶土紅),營造出寧靜、專業且富有品位的氛圍,這與室內設計追求和諧與美感的本質高度契合。字體選擇清晰易讀的無襯線字體,確保信息傳達的效率與優雅感并存。
二、核心板塊與功能布局
- 導航欄: 固定于頁面頂部,結構清晰,包含“首頁”、“關于我們”、“設計服務”、“案例作品”、“設計團隊”、“博客/靈感”和“聯系我們”等關鍵欄目。采用簡潔的懸停效果,用戶體驗流暢。
- 英雄區域(Hero Section): 位于首頁最上方,通過一句強有力的標語(如“重塑空間,定義生活”)搭配震撼的視覺素材,瞬間點明公司“個性定制”的核心價值,并設有顯眼的“預約咨詢”或“查看案例”行動號召按鈕。
- 服務展示區: 以圖標配合簡短說明的形式,清晰列出公司提供的核心服務,如“全屋定制設計”、“軟裝搭配”、“商業空間設計”、“舊房改造”等,讓訪客能快速了解業務范圍。
- 精選案例畫廊: 這是模板的重中之重。采用網格、瀑布流或交互式布局,展示不同風格、不同戶型的成功案例。每個案例都配有高質量圖片,并可點擊進入詳情頁,查看項目背景、設計思路、空間前后對比圖及客戶感言,極具說服力。通常配有按風格(現代、復古、工業等)或按空間(客廳、臥室、廚房等)篩選的功能。
- 設計團隊介紹: 以親切、專業的方式展示核心設計師,包括照片、簡介、設計理念及代表作鏈接,建立信任感與個人連接。
- 博客/靈感中心: 定期更新設計趨勢、材料知識、搭配技巧等文章,不僅提升網站在搜索引擎中的表現,更將公司定位為行業思想領袖,持續吸引和粘住訪客。
- 客戶評價與信任標志: 展示來自真實客戶的評價,并可附上合作品牌或媒體Logo,增強社會公信力。
- 聯系與互動模塊: 包含詳細的聯系方式、公司地址地圖、簡單的預約表單,并可集成在線聊天工具,確保溝通渠道暢通無阻。
三、交互細節與響應式設計
- 微交互: 圖片懸停放大、按鈕顏色漸變、頁面滾動時的淡入動畫等細微效果,能極大提升瀏覽的愉悅感和現代感。
- 響應式設計: 模板必須完美適配從臺式機、平板到手機的各種屏幕尺寸。在移動端,導航會收縮為漢堡菜單,圖片和布局會自動調整,確保在手機小屏上也能獲得清晰、易操作的瀏覽體驗,這對于大多數通過移動設備尋找靈感和服務的客戶至關重要。
四、整體設計理念
這款室內裝飾個性設計公司網頁模板,其精髓在于 “視覺即服務”。它通過極具美感的視覺呈現,直接反映了公司的設計水準;通過邏輯清晰的結構,高效傳達了服務信息;通過人性化的交互,營造了舒適的用戶旅程。它不僅僅是一個信息展示平臺,更是一個沉浸式的品牌體驗空間和高效的業務轉化工具,能夠幫助個性設計公司在激烈的市場競爭中脫穎而出,精準吸引并打動那些尋求獨特空間解決方案的客戶。
(注:以上為基于常見最佳實踐的模板設計描述,實際演示圖應包含具體的界面布局、色彩標注、組件說明等可視化元素。)
如若轉載,請注明出處:http://m.ugci.cn/product/68.html
更新時間:2026-06-19 19:12:18